Кинематика универсальных фрезерных станков
Виртуальная наладка оборудования помогает подобрать необходимые вылеты инструмента, оптимально расположить заготовку и оснастку. Для оборудования со сложной кинематикой более 3-х осей , трудоемкой наладкой токарно-револьверные станки наличие кинематической модели обязательно. В качестве исходных данных необходимо предоставить математическую 3D модель оборудования в свободном формате STEP, IGS , либо подробные чертежи и схемы оборудования. Мы производим упрощение 3D модели оборудования, сохраняя основные элементы, чтобы увеличить скорость симуляции и снизить нагрузку на расчётные мощности компьютера. Далее на элементы оборудования накладываем кинематические связи, ограничения движения и лимиты перемещений. Разрабатываем контроллер, который преобразует код обработки CLData или G-код в движения кинематической модели оборудования.


")








Они предназначены для работы в условиях единичного производства. Помимо расположенных под любым углом плоскостей, пазов, винтовых канавок и т. Большинство фрезерных консольных станков выпускают по классу Н.




| 486 | Войти Правила. | |
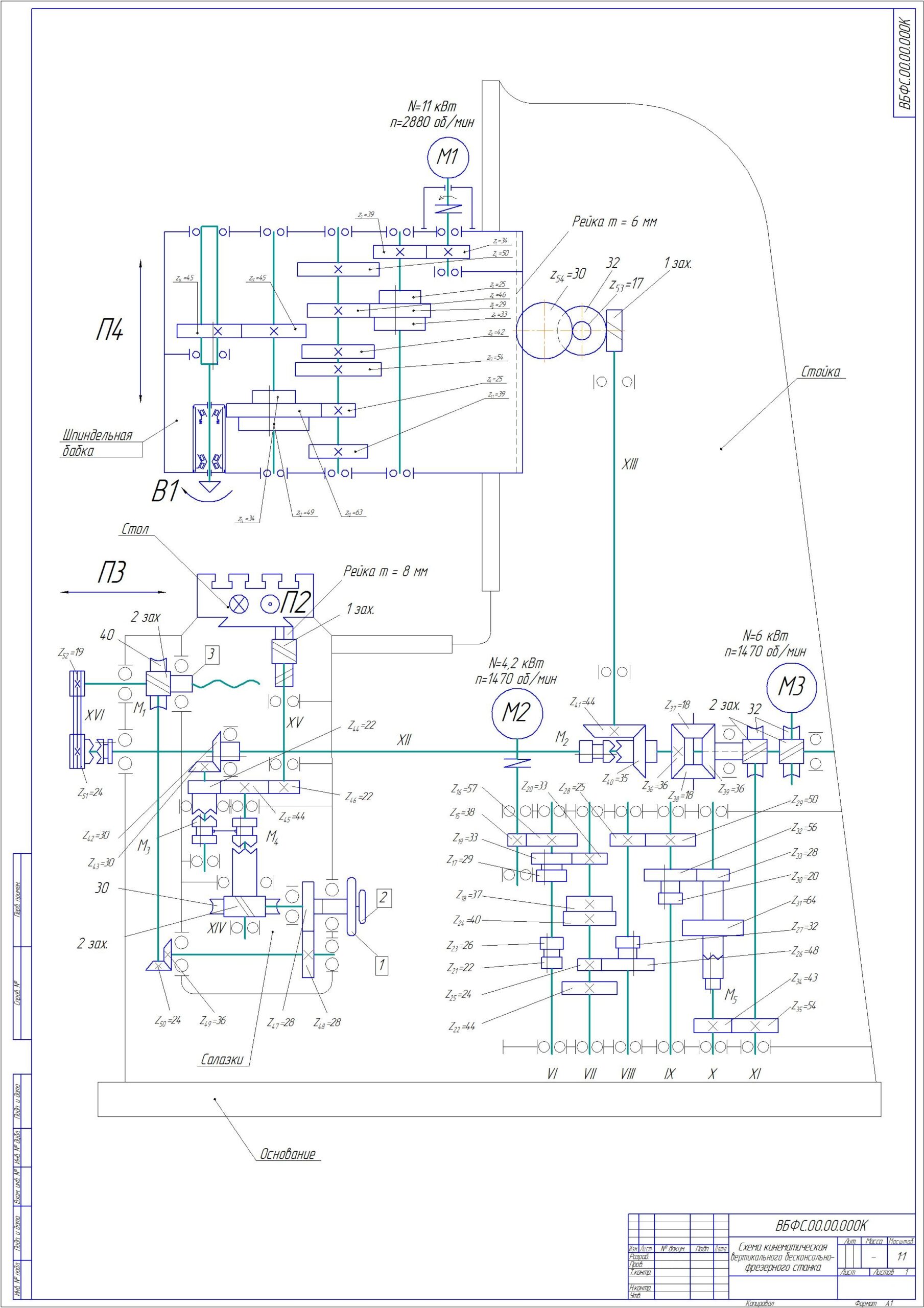
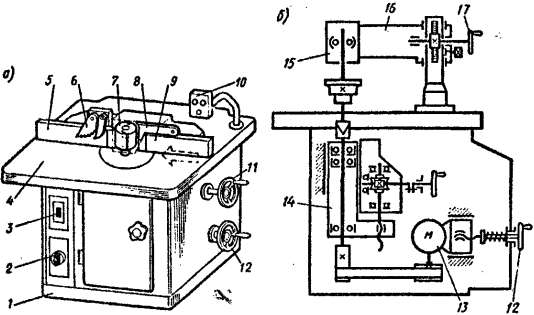
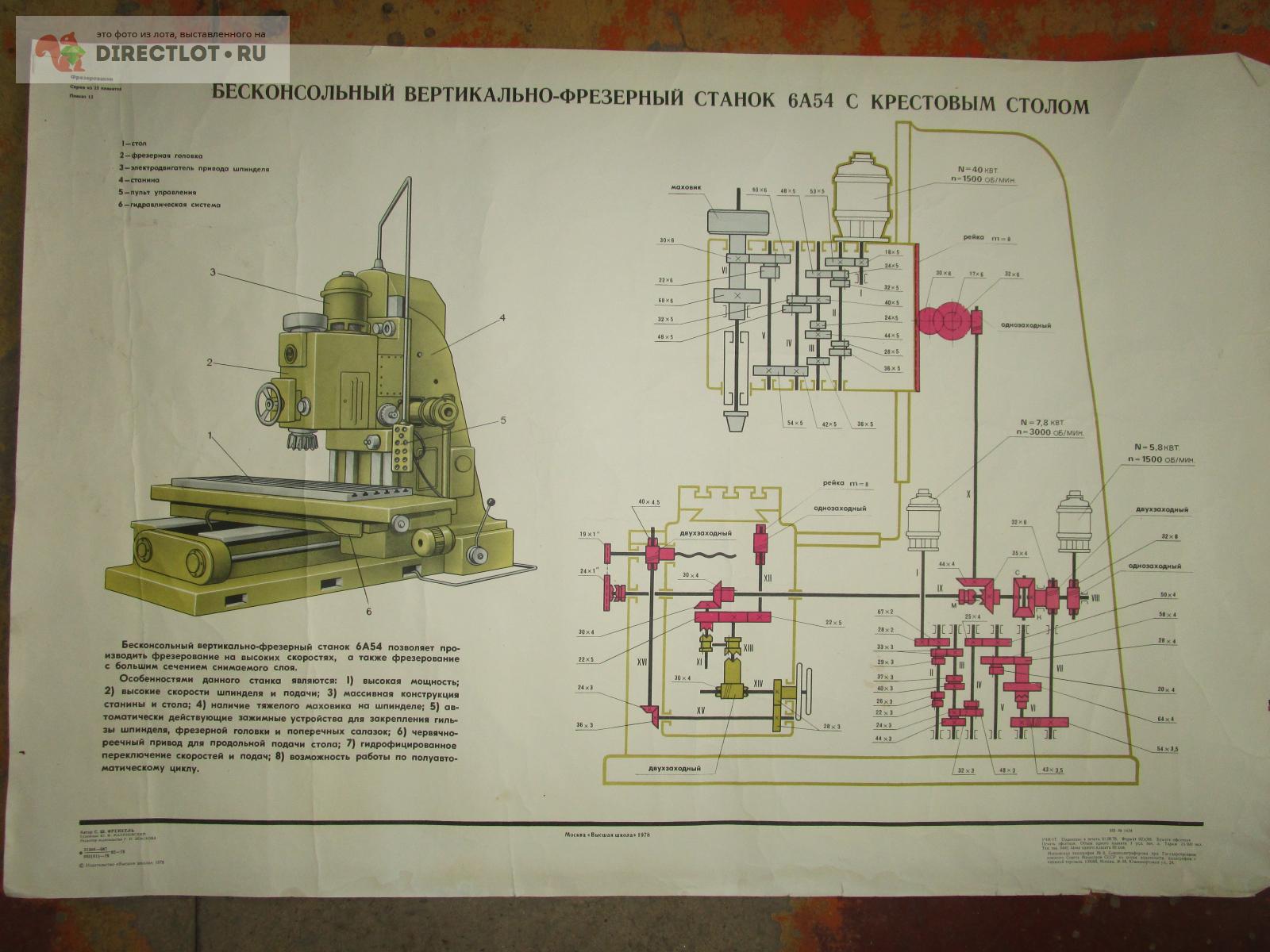
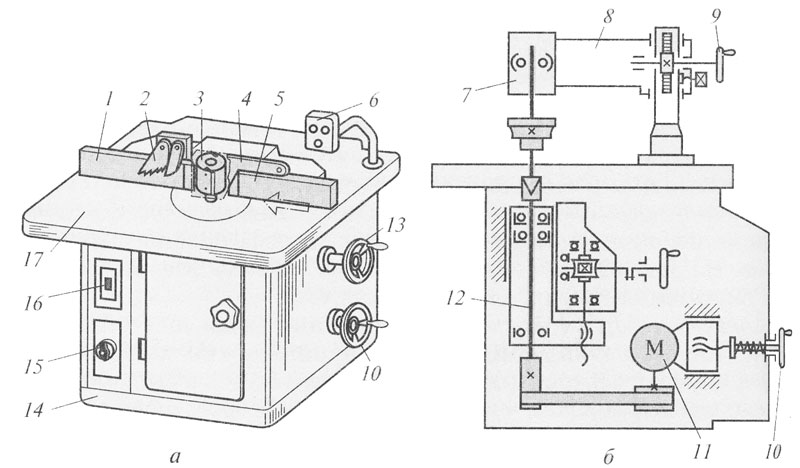
| 293 | Бесконсольный вертикально фрезерный станок , на примере модели П, показан на рис. | |
| 414 | JavaScript is disabled for your browser. | |
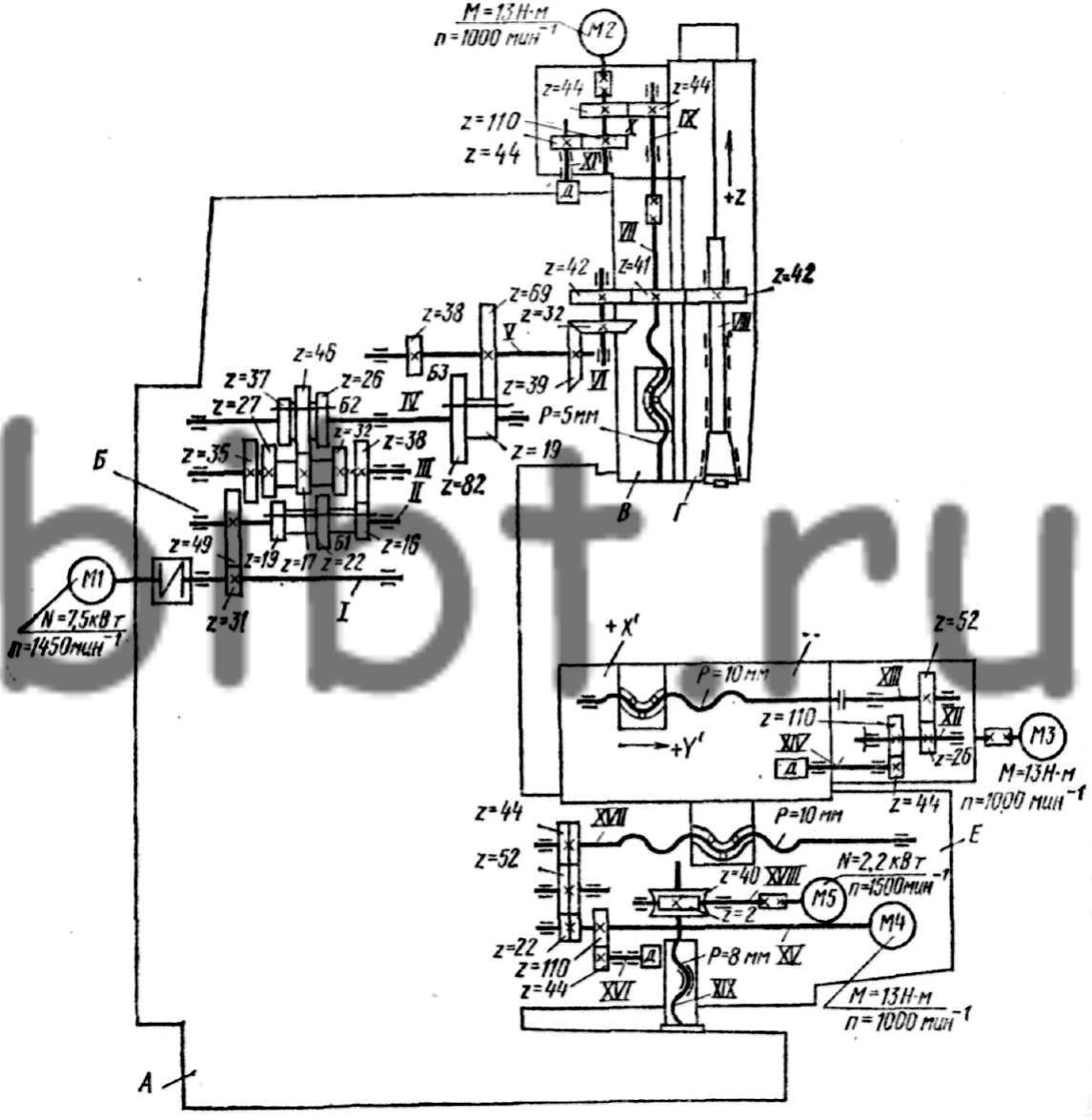
| 439 | Основополагающим фактором, влияющим на качество изделий, изготавливаемых на станках с числовым программным управлением, является кинематика последних. | |
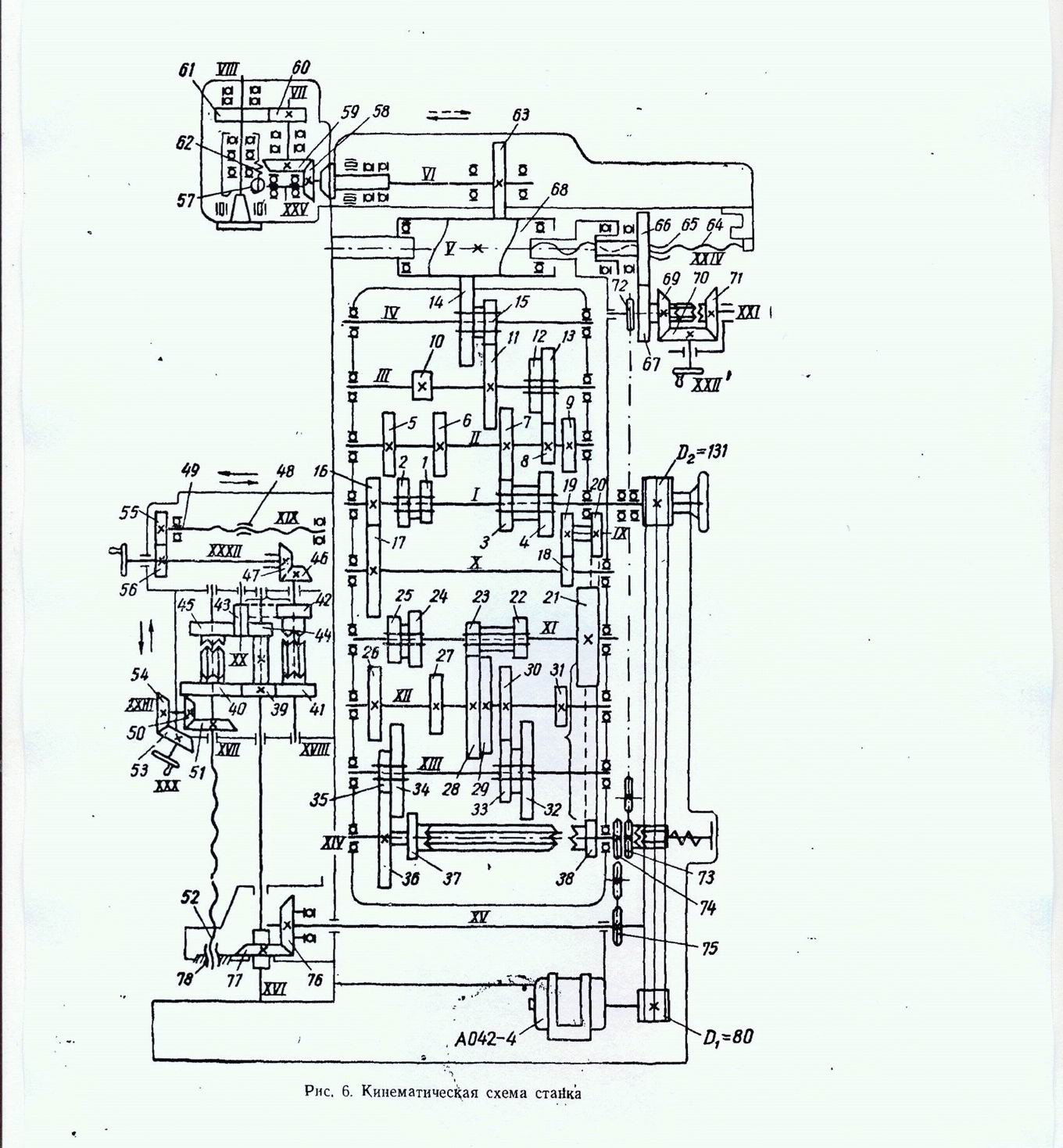
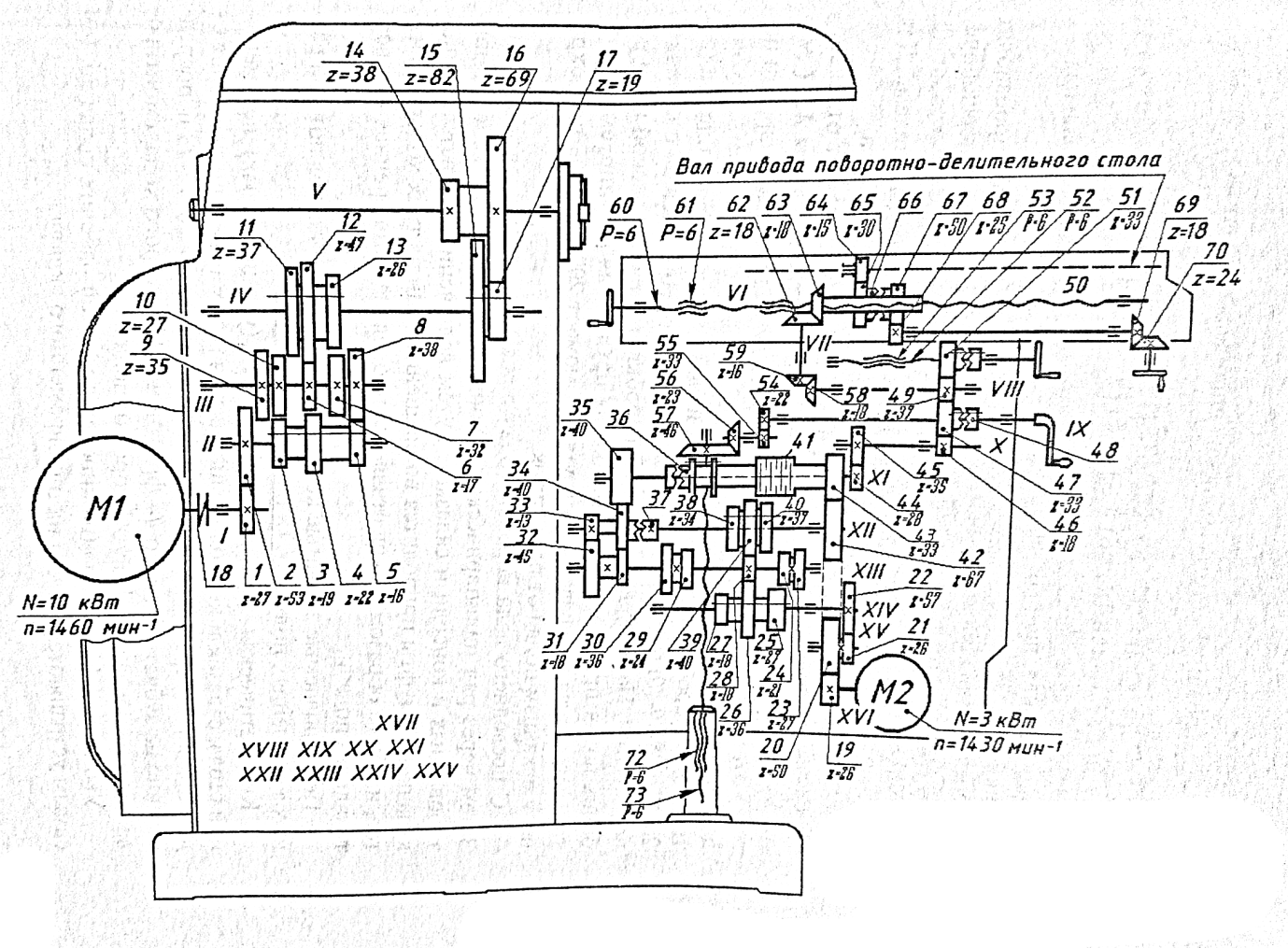
| 220 | Изучить винтовой и реечный механизмы для преобразования вращательного движения в прямолинейно-поступательное движение. Провести анализ кинематической схемы станка из приложения по указанию преподавателя, включающий написание уравнений кинематического баланса в общем и развернутом видах для цепи главного движения и цепи подач. | |
| 321 | Цепь главного движения рис. | |
| 463 | Материалы й студенческой научно-технической конференции Материалы конференции по статьям View Item. | |
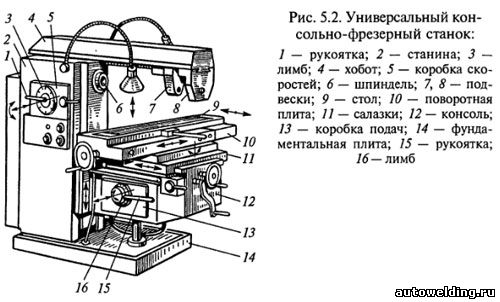
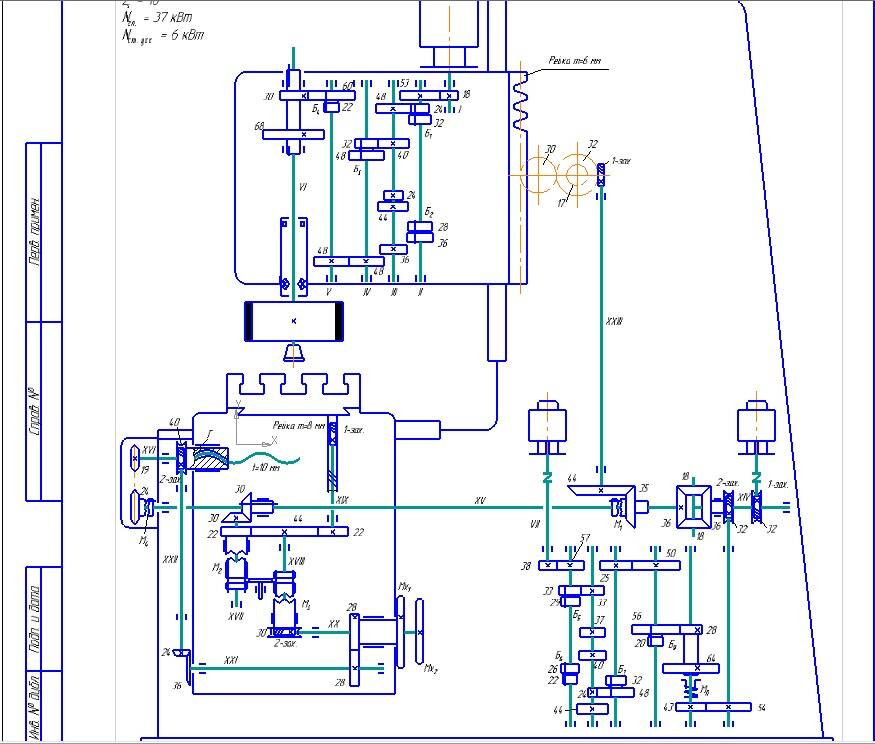
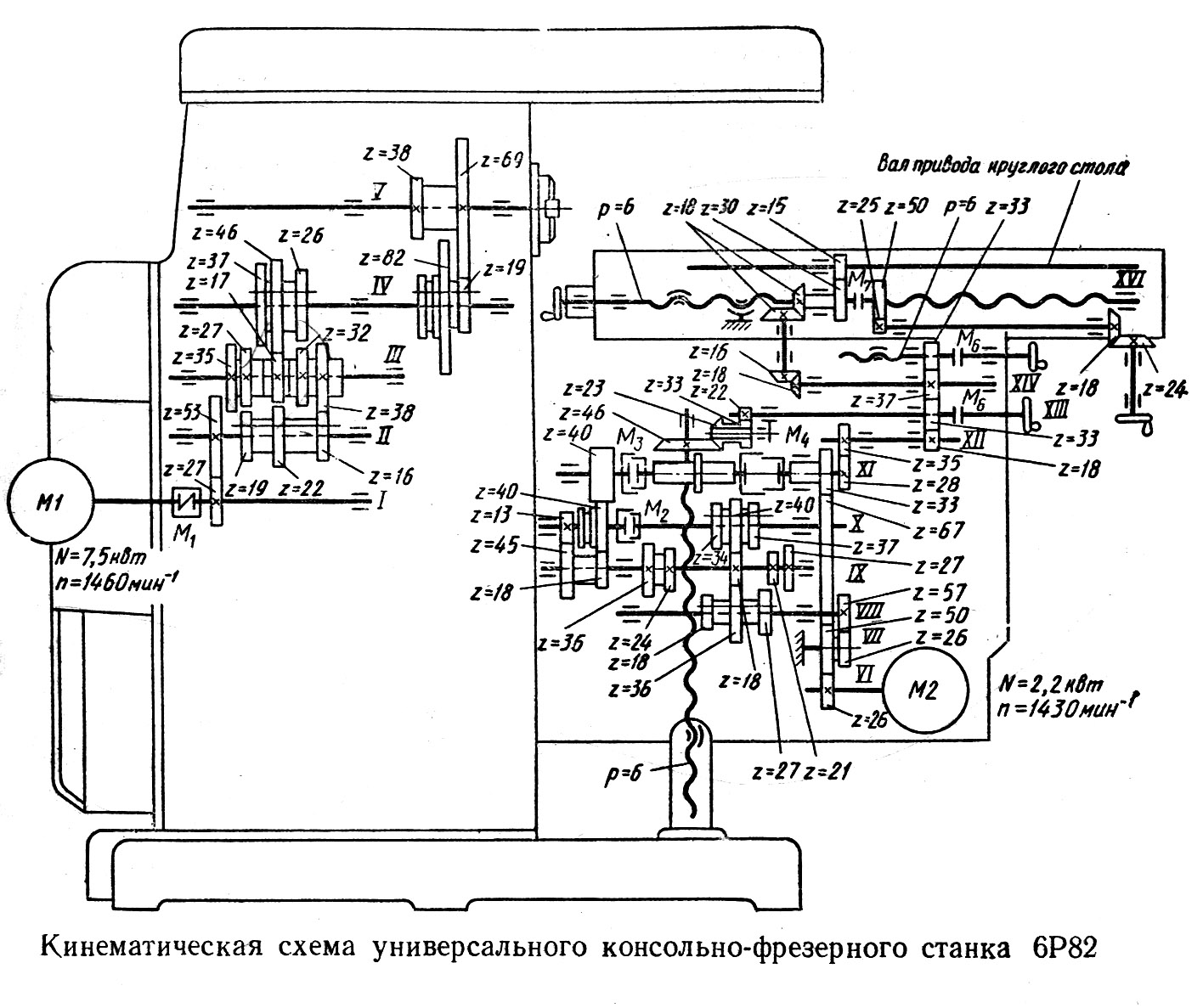
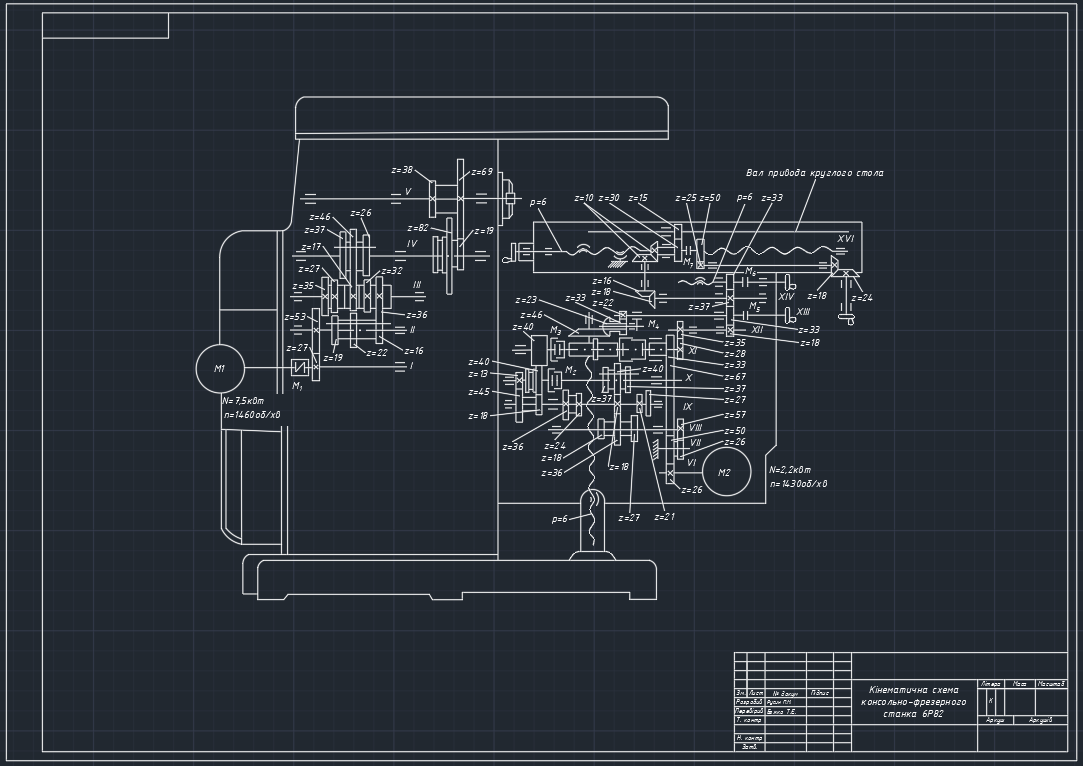
| 233 | Кинематическая схема консольно-фрезерного станка модели 6Р | |
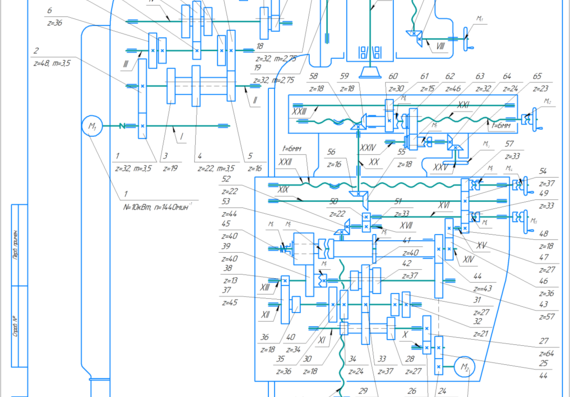
| 408 | Разработка кинематической схемы станка обычно начинается с составления эскизных вариантов структурных схем см. Структурные и кинематические схемы станков , на которых производится предварительная взаимная увязка движений рабочих органов проектируемого станка, особенно когда эти движения обусловливают формообразование обрабатываемой поверхности. | |
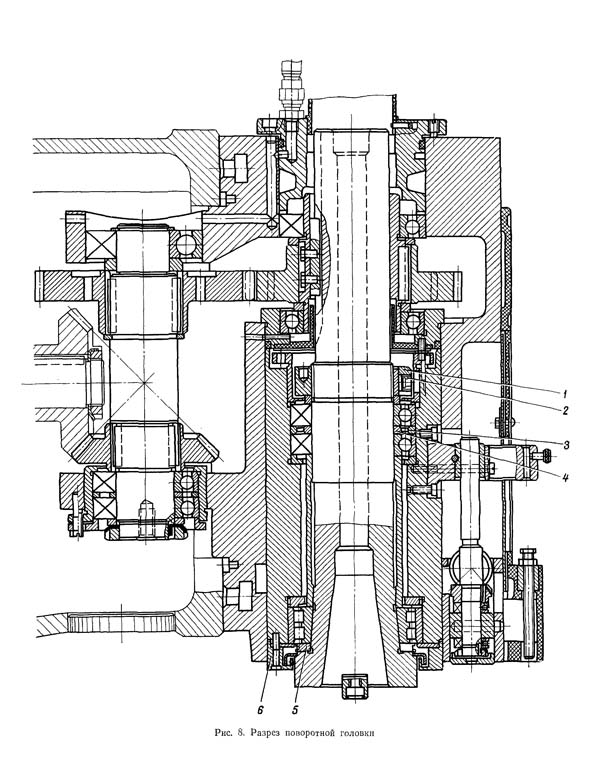
| 435 | Автоматизированные станки и агрегаты с приводом рабочих органов ходовыми винтами можно распределить в зависимости от движения винта и гайки на три группы:. Примером устройств первой группы может служить резьбонарезная силовая головка рис. |
Кинематика станка 6Р13ФЗ Главное движение. Механизм переключения блоков обеспечивает получение 18 частот вращения и позволяет выбирать требуемую частоту вращения без последовательного прохождения промежуточных ступеней. Уравнение кинематической цепи для минимальной частоты вращения шпинделя. Инструмент в оправке крепят вне станка с помощью сменных шомполов.